


Related products
相关产品
发表文章:That's how they roll: skeletal mechanics of enrolment and the importance of hydrostatic support in terrestrial isopods
发表期刊:Arthropod Structure & Development
原文链接:https://doi.org/10.1016/j.asd.2025.101452
使用仪器型号:Neoscan N80 高分辨显微CT
PART 1 研究背景 Background
卷曲(conglobation)是许多节肢动物为防御捕食或避免水分丧失而演化出的典型行为,包括瓢虫幼虫、马陆以及陆生等足类。在 Oniscidea 中,卷曲能力在多个谱系中出现过趋同演化,形态特化程度也高度不一,从只能形成“不完全椭球”到可完全封闭的球状形态。对于可完全卷曲的“滚团型等足类”,卷曲可为其提供双重优势:外骨骼连续防护面降低捕食成功率,并可减少暴露于空气的面积,从而降低蒸散损失。然而卷曲行为的力学机制却长期未被充分解析。虽然先前研究关注到背侧板(tergites)、侧板(epimera)、尾节与尾肢的形态适应,但连续体节之间究竟如何实现大角度旋转、胸腹板如何产生形变以容纳步足等关键问题仍存在假设性推测。
本研究通过Neoscan N80 高分辨显微CT结合快速冷冻固定技术,首次在不干扰卷曲状态的前提下对内在骨骼结构进行精细重建,为揭示真实的卷曲动力学提供了前所未有的结构证据。
PART2 研究方法 Metheod
Neoscan N80 高分辨显微CT 使得卷曲机制中的骨骼滑动界面、胸腹板变形过程、肌肉附着与运动功能得以系统可视化,是本研究得出新结论的核心技术基础。
−10°C 直接扫描快速冷冻的卷曲个体
传统研究难以观察卷曲状态下的内部结构,因为等足类一旦死亡或麻醉便难以保持完全卷曲,而暴力解剖则破坏本体结构。本研究通过液氮快速冷冻保存姿态,并使用 Neoscan N80 的温控样品台进行冻存状态下无损成像。

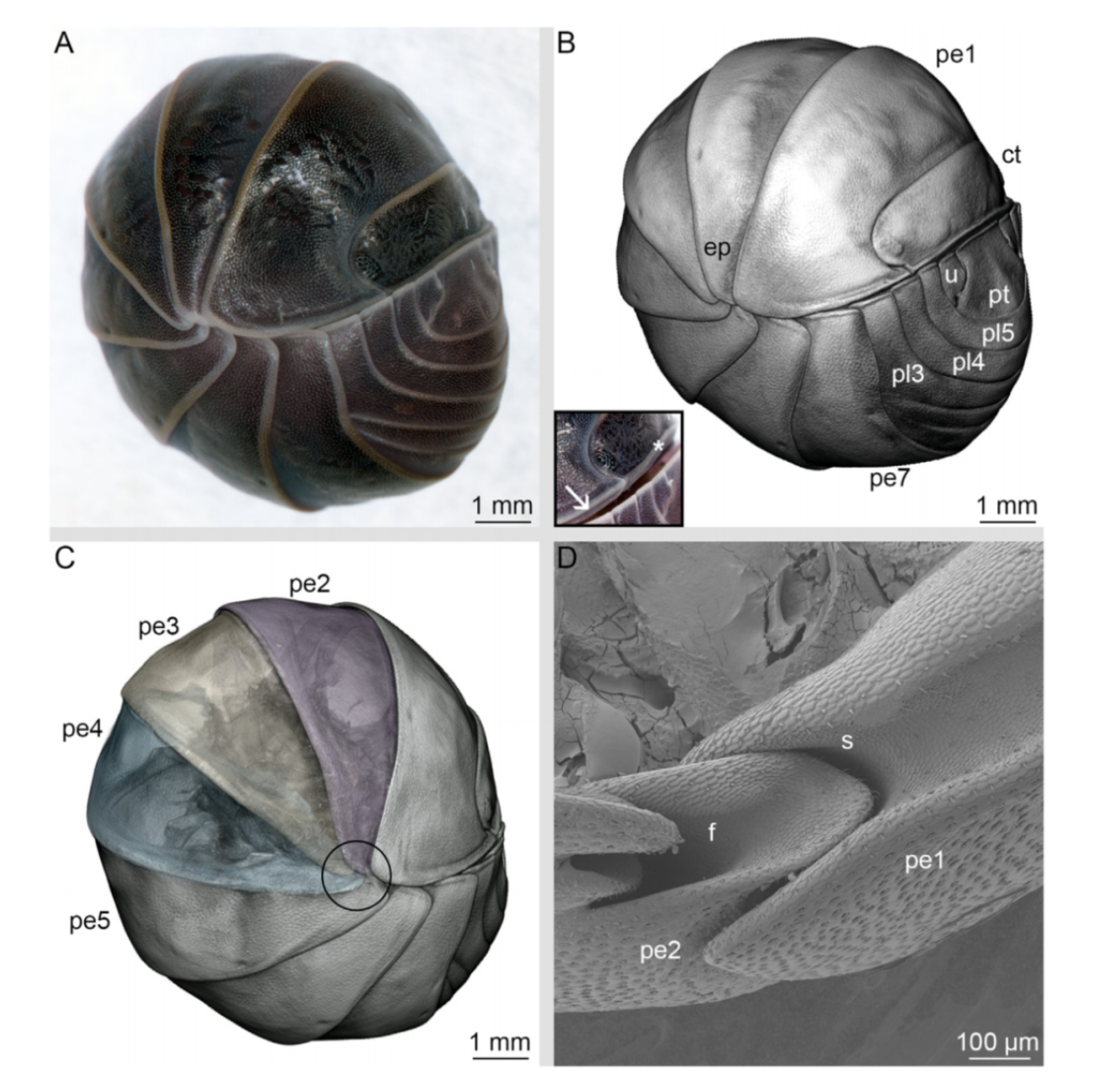
图1. Armadillo officinalis 的卷曲行为。(A) 活体 A. officinalis 个体卷成紧密球形的照片,附肢完全被隐藏。(B) 通过显微 CT 获取的、快速冷冻个体的三维重建图。可以看到胸节侧板(ep)彼此重叠;尾节(pt)、尾肢基节(u)以及第 5 腹节的侧板(pl5)贴靠在头胸甲(ct)上;而第 3、4 腹节的侧板(pl3、pl4)以及第 7 胸节(pe7)的侧板则压靠在第 1 胸节(pe1)的侧板上。插图:第 1 胸节侧板上的侧缘沟槽(箭头)以及头胸甲前缘的沟槽(星号),这些结构用于容纳身体后部的边缘。(C) 显微 CT 显示,第 3–5 胸节(pe3–pe5)的侧板前角嵌入第 2 胸节(pe2)后侧的沟槽内。(D) 第 1、2 胸节侧板的特化结构:第 1 胸节上的裂沟(schisma, s)以及第 2 胸节上的后侧沟槽(g)。
2 高分辨率成像
卷曲的关键在于体节之间的接触和滑动,而这些结构常被外侧骨板覆盖。Neoscan N80 高分辨显微CT 提供了 三维、可切片观察的内部结构图像,首次证实体节之并无固定关节,而是通过背外侧的嵌靠脊(ridges)形成可分离的滑动接触面。
3 通过 PTA 染色的软组织增强实现肌肉重建
研究者对去钙样本进行 PTA(磷钨酸)染色后使用 Neoscan N80 高分辨显微CT扫描,重建了背腹纵肌及斜向肌群,使得研究能够描述 肌肉收缩与骨骼形变之间的对应关系。
PART3 体节重定位机制:卷曲的真实旋转点位于背外侧
研究通过 Neoscan N80 显微CT 扫描横断面和三维重建发现,连续体节之间并非通过硬质关节连接,也不存在类似脊椎动物的铰链结构。相反,每两个相邻背板之间存在一对相互接触的脊状结构——前一个背板的后嵴(posterior ridge)与后一个背板的前嵴(anterior ridge)。这两条嵴并不互锁,而是通过一个可分离的滑动接触界面实现“滚动式相对运动”。换言之,卷曲过程中体节不是在固定轴上旋转,而是让两个嵴沿着彼此的曲面滑动,形成类似圆弧滚动的运动轨迹。正是这种结构使得等足类可以获得足够大的旋转角度,以便将整个身体折叠成球体,而不受限于传统关节的固定轴性。

图2. Armadillo officinalis 胸节背板(pereon tergites)的形态,以第 3 胸节背板为例进行展示:(A) 前外侧视图:在背板前缘可以看到一条前嵴(ar)。(B) 后外侧视图:背板沿其后缘向自身方向折叠。在背板与关节膜(arthrodial membrane)的连接处,有一条贯穿背板的后嵴(pr)。(C) 前背侧视图:可见整个前嵴(ar)。卷曲过程中,该嵴与前一节背板接触的位置为图中圆圈所标示的凹陷处。(D) 腹侧视图:图中圆圈标示的是后嵴(pr)上供下一节背板旋转的关键接触点。
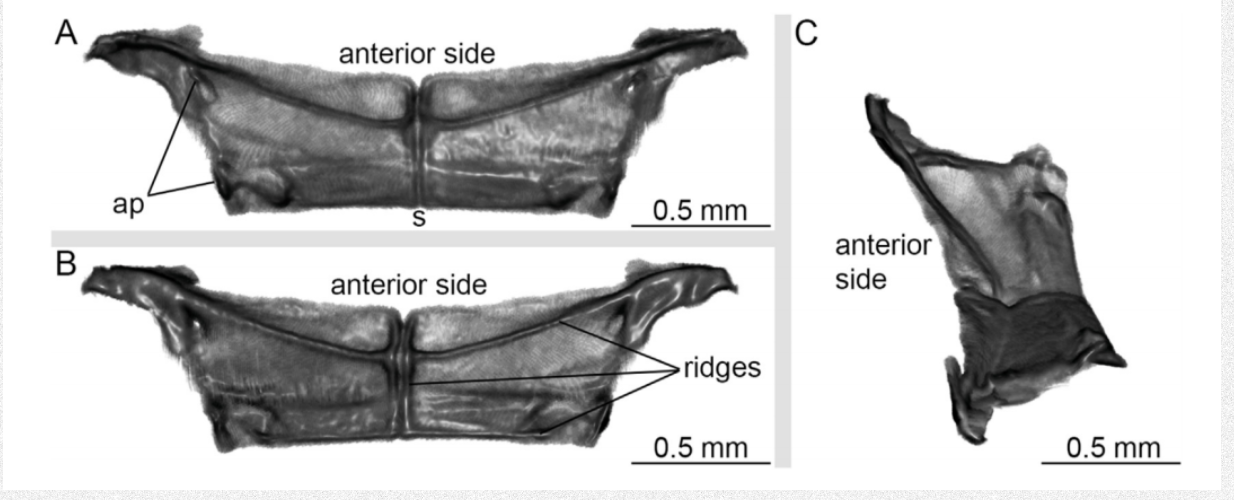
图3. Armadillo officinalis 胸节腹板(sternite)的形态。图示第 3 胸节腹板:(A) 背视图:腹板前缘较宽,中央沿中线具一条缝合线(s),两侧近外缘处各有一对内突(ap);(B) 腹视图:可见成对的脊状隆起;(C) 背侧斜视图:腹板整体呈复杂立体形态,其边缘向背方延伸的程度大于中央区域。

图4.Armadillo officinalis 卷曲过程中胸节的旋转。(A) 伸展状态下第2(pe2)与第3(pe3)胸节的侧面观(上)及侧腹面观(下):腹板2(st2)与腹板3(st3)互不接触,两节间的旋转点以圆圈标出;(B) 卷曲状态下同一胸节:两节相对旋转,腹板与侧板(epimera)相互叠覆;小图示意所描绘胸节在整体体位中的位置。
这一发现从根本上推翻了过去基于解剖的“腹侧铰链模型”,后者假设每个体节在胸腹板处存在旋转轴。然而 Neoscan N80 清楚显示胸腹板在伸展状态下并不接触,因而不可能形成关节;实际旋转发生在更靠背外侧的位置。这一位置的重估对于解释卷曲时腹部压缩与背部伸展的耦合关系具有关键意义,因为它说明卷曲动作本身就是一种由背外侧支点主导的体节折叠,而非像先前模型那样由腹侧进行铰链式弯曲。
PART 4 胸腹板的动力性重塑:用于容纳步足几何化结构变化
胸腹板(sternites)在卷曲中的作用长期未被充分认识。本研究借助 Neoscan CT 显示,胸腹板在伸展状态下彼此并不接触,且中线存在明显的柔性缝合结构。卷曲时,各节胸腹板不仅发生相对重叠,还出现显著的几何形态变化——中线被向内牵拉,从外凸变为近乎平直甚至轻微内凹。这种形变使得两节胸腹板之间形成一个向内凹陷的“足沟”(leg furrow),为步足基节提供空间,使其能够紧贴腹面收纳。

图6. Armadillo officinalis 腹节的活动性。(A、B) 伸展状态(A)与卷曲状态(B)下的第7胸节(pe7)与第1腹节(pl1);两节间的旋转点以圆圈标出。(C) 第7胸节背板的后侧斜视图,显示其后脊形成的凹陷(箭头)。(D) 卷曲个体的侧面观:第1、2腹节侧板(pl1、pl2)以及第3腹节侧板上的突起(星号)共同抵靠在第7胸节的凹陷(箭头)内。
重要的是,这种腹板弯曲并非由骨骼结构本身提供,而是依赖中线缝合区域的柔性组织。通过 CT 配合机械压迫实验可见,该缝合带具有高度变形能力,说明这是卷曲演化中特别强化的结构特征。在非卷曲型等足类中,胸腹板较长且常态下就与相邻节重叠,足沟在平时即已形成;而在卷曲型种类中,胸腹板刻意缩短,使得足沟仅在卷曲时才出现,确保伸展状态下腹面平整,以提高运动效率。这种“可逆形变结构”体现了卷曲演化中对空间利用的极致优化。
PART 5 步足与触角的重新布局:卷曲空间中的器官配置策略
Neoscan CT 的三维重建显示,步足在卷曲过程中的摆放具有高度固定且精巧的模式。步足的基节被压入由胸腹板重叠形成的足沟中,中间几节外展,而末端节(propodus、dactylus)大多呈近垂直姿态贴合身体侧面。这样的三维布局兼顾了紧凑性与不受压损伤,为构成球体内部的空间结构提供了合理解释。
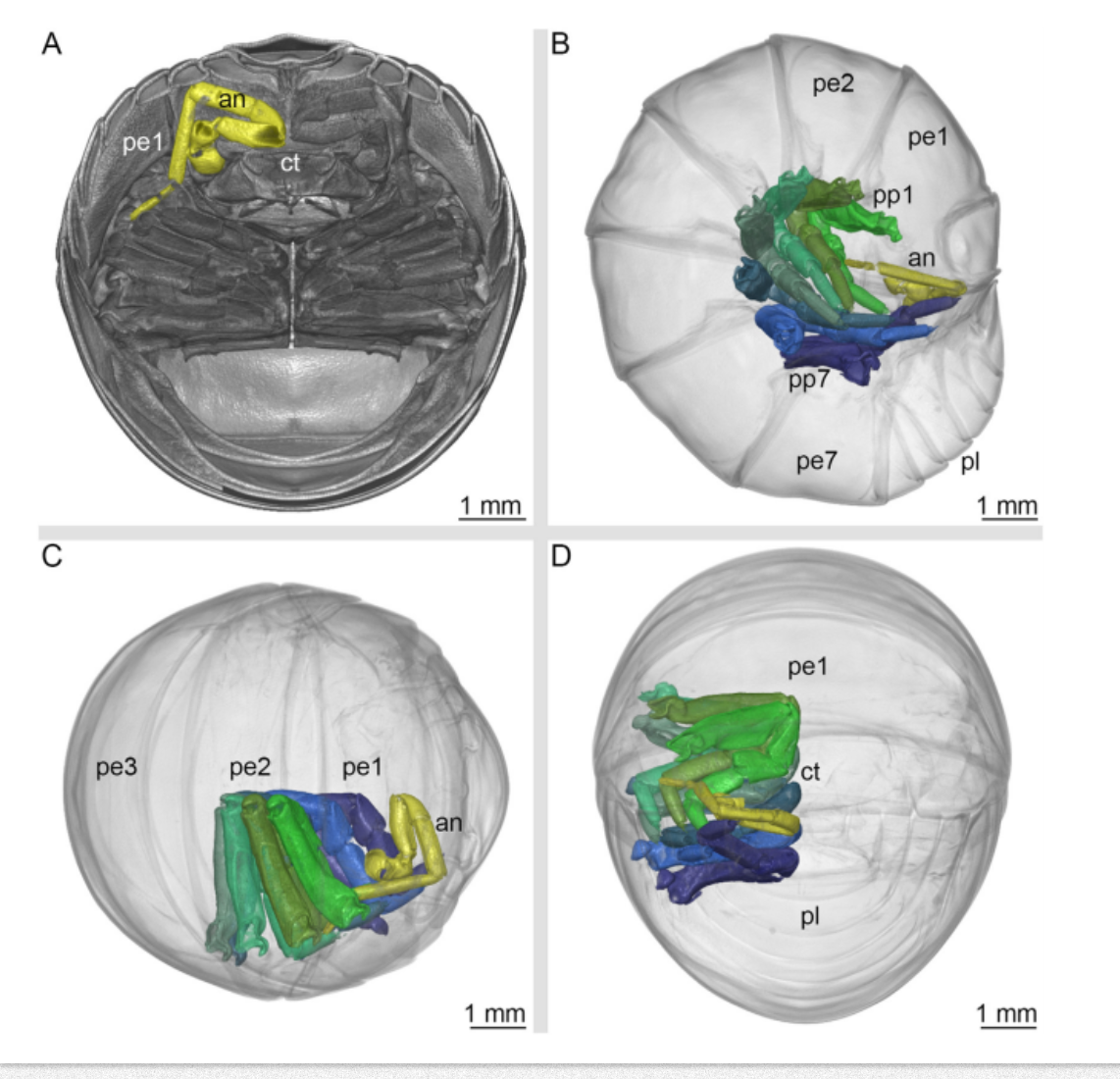
图7. Armadillo officinalis 卷曲过程中附肢的位置。(A) 第二触角(an)的姿态:触角的第1–4节折入头胸部(ct)的凹陷内,第5节及鞭节向后沿第1胸节侧板(pe1)延伸;(B–D) 卷曲个体触角与步足的位置:侧面观(B)、背面观(C)及前面观(D);pe2、pe3、pe7 = 第2、3、7胸节;pl = 腹节;pp1、pp7 = 第1、7步足。
触角的收纳方式在不同谱系中存在一定差异,但目标一致:在头胸部形成能完全容纳触角的凹槽或沟槽,使其在卷曲时完全消失于外表。A. officinalis 和 A. vulgare 分别采用了不同的头甲凹槽结构,但两者触角的最终布局都呈现出前几节折叠于头甲下方,末端节沿第一胸节侧缘向后延伸的模式。这说明卷曲相关的触角重塑是多次趋同演化的产物。
PART6 肌肉系统解析: 卷曲与伸展的动力来源
在软组织 PTA 染色增强后的 Neoscan CT 扫描中,研究者清晰重建了参与卷曲的主要肌群,包括背侧纵肌(负责伸展)、腹侧纵肌(负责卷曲)和斜向 dorsoventral 肌群(负责牵拉胸腹板并可能参与液压调控)。这些肌群均分节排列,其附着点与骨骼嵴的位置严格对应,进一步支持了“背外侧滚动面”模型。

图8. Armadillidium vulgare 的卷曲行为:(A) 利用显微 CT 对速冻个体进行的三维重建;(B) 卷曲个体第 2(pe2)与第 3(pe3)胸节背板:两节间旋转点以圆圈标出,第 3 胸节背板前缘的侧突(lp)抵靠在第 2 胸节背板后缘的沟槽内;(C) 伸展个体第 2、3 胸节的侧面观(上)与侧腹面观(下):腹板 2(st2)与腹板 3(st3)彼此分离,第 2 背板后缘的突起(箭头)形成供下一背板侧突倚靠的沟槽;(D) 卷曲个体同一胸节:侧面观(上)与侧腹面观(下)显示腹板相互重叠。
腹侧纵肌的收缩使体节沿背外侧支点发生卷曲,而背侧纵肌的收缩则能实现背向伸展。由于旋转点位于两个肌群的附着点之间,这种对拉结构使得体节能够双向弯曲——这一点恰与 Neoscan CT 所揭示的体节接触面位置完全吻合并相互验证。
PART 7 液压骨骼: 解释等足类多方向弯曲能力
传统认为拥有硬质外骨骼的节肢动物无法利用液压结构进行运动,但本研究通过行为观察与实验证实,陆生等足类在许多运动中严重依赖体腔血淋巴的液压支撑。研究显示,即便是卷曲型物种,它们仍能进行明显的侧向弯曲与背向弯曲,而这种多自由度运动无法由固定结构的背板接触界面解释。Neoscan CT 显示这些界面是可分离的,因此在非卷曲状态下,体节间的旋转中心可以动态变化。
研究者进一步通过从 P. scaber 中抽取体腔血淋巴,观察到个体体长显著缩短;更关键的是,侧向弯曲能力完全丧失,而腹向弯曲仍然存在。这直接证明体腔液压是产生多向运动自由度的必要条件,外骨骼只提供边界约束,而内部液压系统才是支撑形体变化的关键。
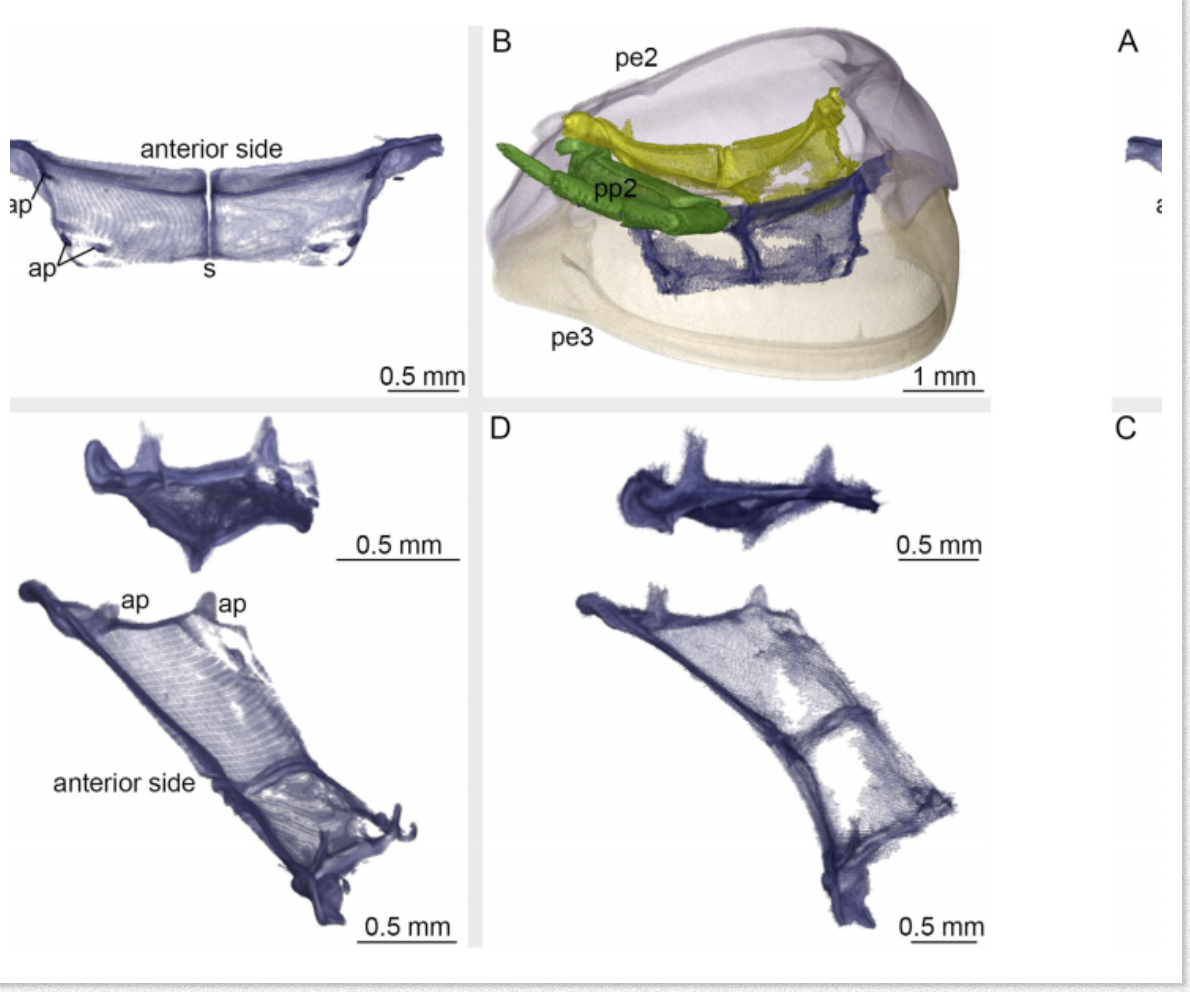
图9. Armadillidium vulgare 胸节腹板的形态:(A) 第3胸节腹板背视图:前缘较宽,中央沿中线具缝合线(s),两侧近外缘各有一对内突(ap);(B) 卷曲个体第2(pe2)与第3(pe3)胸节的腹面观:重叠的腹板共同形成一对步足沟,容纳第2步足基节(pp2);(C) 伸展个体第3胸节腹板的侧面观(上)与背侧斜视图(下):腹板中线向下弯曲,内突(ap)清晰可见;(D) 卷曲个体同一腹板近乎平坦。

图10. Armadillidium vulgare 卷曲过程中附肢的位置。(A) 第二触角(an)的姿态:第1、2节折藏于头胸部触角叶(al)下方,第3、4节压入触角叶上方的沟槽,第5节及鞭节向后沿头胸部侧面与第1胸节侧板(pe1)延伸;(B–D) 卷曲个体触角与步足的位置:侧面观(B)、背面观(C)及前面观(D);ct = 头胸部;pe1、pe2、pe7 = 第1、2、7胸节;pl = 腹节;pp1、pp7 = 第1、7步足。
PART 8 卷曲机制的综合模型与旧理论的修正
基于以上结构与力学证据,研究者提出了新的卷曲模型:体节的旋转中心位于背外侧的接触滚动面,由腹侧纵肌驱动卷曲;胸腹板在斜向肌群牵拉和几何压缩下内凹变形;步足被重新安置于足沟中;体腔液压提供多方向形体变化的底层支撑。这一模型不仅完整解释了卷曲过程的各项观察现象,也成功解释了为何卷曲型和非卷曲型等足类在运动能力上具有连续性。
相较之下,旧模型由于缺乏三维成像支持,误将旋转点放在结构并不接触的胸腹板处,并假设存在固定铰链。这不仅无法解释胸腹板的可逆变形,也无法解释等足类的侧向弯曲。因此,Neoscan CT 的数据首次让研究可以以可验证的结构证据取代半推测式的传统模型,对等足类运动生物学具有奠基意义。
PART9 结语 Conclusion
本研究通过 Neoscan 显微CT 成功揭示了陆生等足类卷曲行为的真实骨骼力学机制,不仅推翻了流传七十余年的传统模型,也首次连接了骨骼结构、肌肉动力学与液压系统的协同关系。卷曲行为从表面上的简单动作被证明是多层次结构重塑的综合结果,包括背外侧滚动接触面、胸腹板柔性变形、步足与触角的空间重组以及体腔液压的多方向支撑。
对于研究陆生节肢动物的运动机制、外骨骼设计演化以及软体机械仿生学,本研究都具有深远的启示意义,而这一切都建立在 Neoscan 显微CT 所带来的结构可视化突破之上。
获取更多 Neoscan 高分辨显微CT的产品详情和应用案例,欢迎联系我们:400 857 8882

如果您想要了解更多产品信息,请填写以下信息下载产品手册, 我们收到您的信息后将第一时间回复您。








